Уважаемый Antry Вы очевидно меня тролите?
Иначе как объяснить, что в статье о которой вы высказались ранее
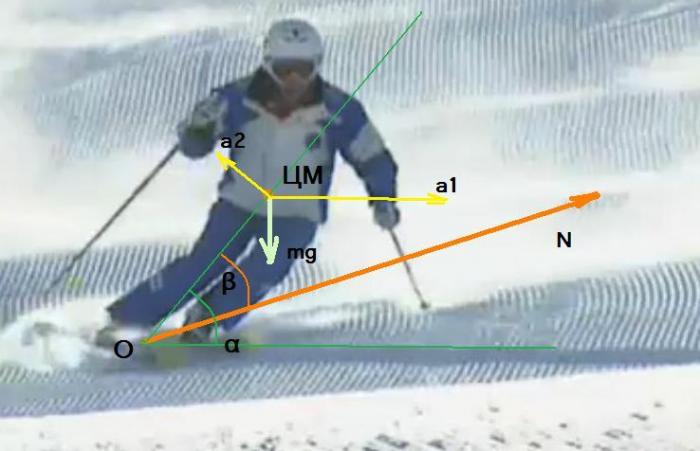
в первой половине этой статьи, которая Вам ТАК понравилась, авторы используют как непонятную Вам неинерциальную систему отсчета, так и ненавистную вам формулу для радиуса закантованной лыжи?
Прошу Вас определиться со своей позицией.
Про муху на тарелке я вообще ничего не понял, но улыбнуло.
Никакого троллинга. Первая половина статьи заканчивается на странице 4 (выкладки статьи приводятся на 8 страницах, далее идёт пример расчёта). Поэтому мне понравилось всё до стр. 4. Далее я упёрся в эту специфическую формулу и честно говоря не стал вникать в остальные допущения и тем более примеры расчётов. Но теперь стало понятнее, формула достаточно точно описывает поворот на кантах в интервале примерно 10-60 градусов закантовки, реальный радиус поворота примерно на 10 % меньше расчётного. Почитаю статью дальше.
Про муху на тарелке тоже всё просто. Если муха ползёт по вращающейся тарелке, то если расположить оси координат на этой тарелке, то для мухи нельзя будет написать второй закон Ньютона. Чтобы это можно было сделать, придумали ещё в 18 веке центробежную силу, которая якобы действует на муху от вращения тарелки. Тогда появляется возможность написать 2 закон для мухи относительно тарелки (тарелка при этом исчезает). Но сейчас поступают обычно по-другому (насколько я знаю). Рассматривается сложное движение - простое (заданное) вращение тарелки относительно стола и простое (заданное) перемещение мухи относительно тарелки. Этот подход позволяет вычислить абсолютное ускорение мухи относительно стола и относительное ускорение мухи по тарелке.
Если муха просто поворачивает по столу, то это простое движение.
Если муха состоит из двух (и более) звеньев, тогда надо задать движение одного звена относительно стола и задать закон движения второго звена относительно первого, соединённого с ним. Получится сложное движение, по формулам которого можно найти ускорение второго звена относительно стола. Так наверно и рассчитывается кинематика роботов.
Усилия, возникающие в суставах роботов, зависят не только от кинематики (скорости и ускорения), а так же от того что робот должен поднимать. Может быть 2 одинаково быстрых робота, но один слабый, а другой сильный и массивный, но лишняя масса будет только мешать быстроте.