Это не так, и я об этом много говорил,
Да, Вы много раз говорили - "это не так", но не приводили при этом никаких объяснений, по какой причине угол наклона опорной линии вдруг начинает меняться, при том, что действие силы тяжести уравновешивает действие ЦБС в каждый момент времени.
Это же абсурдная ситуация.
Представьте, что вы, на основе ваших решений, которые приведены в статье, сделали анимацию проезда вашей модели.
В этой анимации модель едет вниз по склону, совершает одну пологую дугу длиной около 20м и по ходу движения практически заваливается на бок.
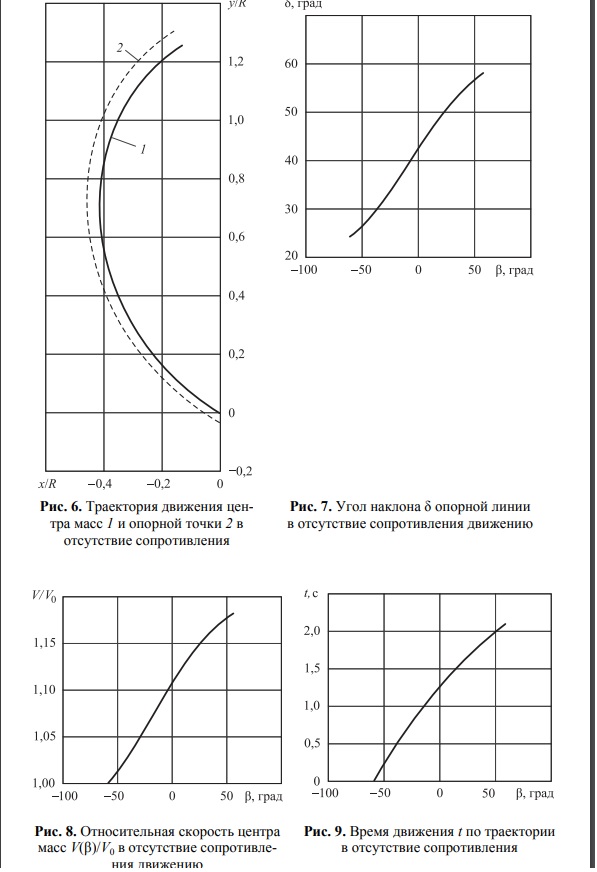
В начале анимации угол наклона модели к склону составляет 70о (угол закантовки - 20о) а в конце анимации угол наклона модели к склону составляет 30о (угол закантовки - 60о) (данные взяты из ваших решений).
Вы показываете эту анимацию коллегам-лыжникам и говорите - "Посмотрите, этот лыжник совершает равновесный поворот!"
Угадайте, что Вам ответят эти коллеги-лыжники?
Ответ очевиден. Как минимум они скажут - какое же это равновесие если модель почти завалилась на бок?
И они будут правы, так как ваши решения приведенные в статье не имеют физического смысла, хотя они являются формально правильными решениями вашей системы (6,7)
Вы приводили объяснения, которые выходили за рамки вашей модели.
Вы говорили- да, лыжник КАК МОДЕЛЬ едет на монолыже без ангуляции, НО это невозможно на практике.
Ведь РЕАЛЬНЫЙ лыжник едет НА ДВУХ ЛЫЖАХ и это дает ему возможность управлять движением - увеличивать ВСЕ ВРЕМЯ угол закантовки, добиваясь тем самым равновесия в каждый конкретный момент времени.
Но ваша модель НЕ МОЖЕТ такого сделать по определению.
Поэтому такое Ваше объяснение некорректно.
Ваша ошибка в том, что Вы не учли, что динамика изменения угла наклона опорной линии в вашей модели увязана с общей динамикой задачи и ОПРЕДЕЛЯЕТСЯ этой динамикой.
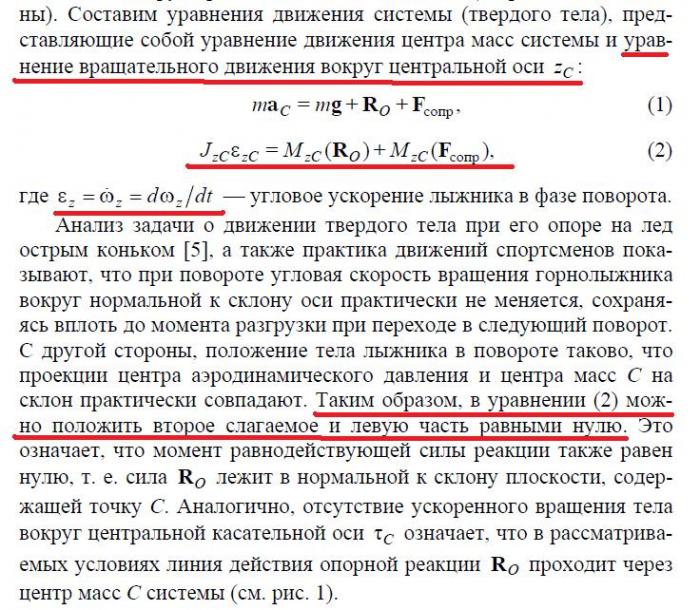
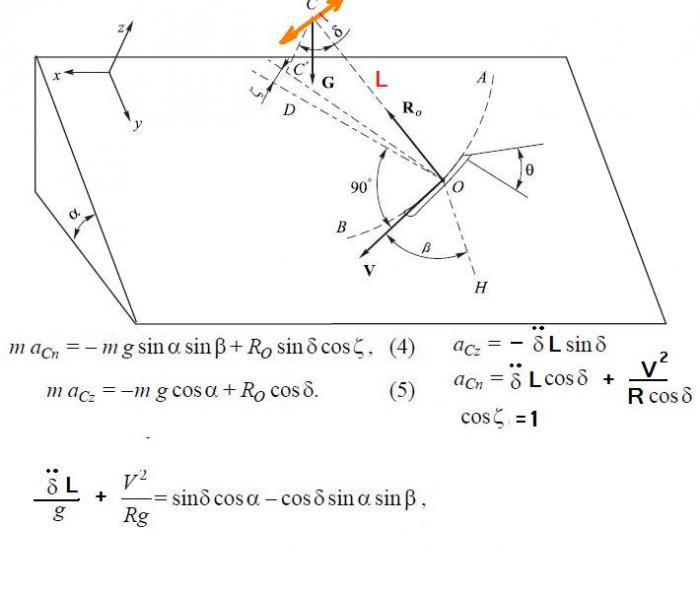
В случае наличия изменения угла наклона опорной линии, как это имеет место быть в ваших решениях, в уравнение (7) в вашей статье должно входить слагаемое, пропорциональное второй производной по времени от угла наклона опорной линии.
Уравнение (7) в таком виде и увязывает динамику изменения угла наклона опорной линии в вашей модели с общей динамикой задачи.
И этим слагаемым нельзя пренебрегать ввиду "его малости".
Вы эту динамику убрали из задачи волевым решением и тем самым превратили угол наклона опорной линии в некий независимый параметр, значение которого вы подбираете в каждой точке траектории так,чтобы ЦБС и МЖ были уравновешены.
При этом направление изменения этого параметра в вашем случае противоречит законам динамики, но ваши уравнения (6,7) этого "не замечают".
Сообщение отредактировал nick5t5: 12 November 2018 - 13:43